? 400-1399-168
為先進制造提供最有價值的解決方案
為先進制造提供最有價值的解決方案
日前,省經(jīng)信廳公布第二批工業(yè)領(lǐng)域行業(yè)產(chǎn)業(yè)大腦建設(shè)名單。蕭山 機器 人行業(yè)產(chǎn)業(yè)大腦項目成功入選,是杭州市唯一一個入選的產(chǎn)業(yè)大腦! 什么是產(chǎn)業(yè)大...

成都建設(shè)路小吃街,一家網(wǎng)紅火鍋店內(nèi)響起陣陣歌聲,身穿統(tǒng)一服裝的工作人員跳著舞、舉著燈牌,陸續(xù)為幾名食客唱歌慶生,親愛的親愛的生日快樂,每一...

搬運機器人 選購時要從這幾個方面考量 現(xiàn)在很多行業(yè)為了降低用人成本會選擇機器人, 機器人 由于一次投資可以多年利用,這樣就能提高工作效率,還可...

近年來,激光加工技術(shù)廣泛普及,越來越多的行業(yè)在產(chǎn)業(yè)升級過程中選擇了激光加工,這讓激光工藝有了更廣闊的發(fā)展空間,也有了更多的創(chuàng)新和探索。其...

社會生活日新月異,新的商業(yè)模式、新的應用場景層出不窮。當變革變成了一種常態(tài),技術(shù)創(chuàng)新驅(qū)動了行業(yè)的變革,新的需求驅(qū)動了新的應用,新的力量、...

近日,由成都市溫江區(qū)人民政府主辦,成都市溫江區(qū)新經(jīng)濟和科技局、中科源碼服務機器人研究院共同承辦的溫江區(qū)醫(yī)療機器人創(chuàng)新與產(chǎn)業(yè)發(fā)展論壇在成都...

搬運機器人 選購時要從這幾個方面考量 現(xiàn)在很多行業(yè)為了降低用人成本會選擇機器人, 工業(yè)機器人 由于一次投資可以多年利用,這樣就能提高工作效率,...
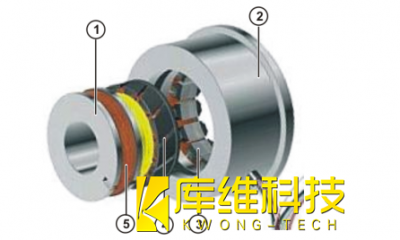
工業(yè)機器人 庫卡KRC4分解器是什么? 庫卡機器人KRC4分解器用于分析處理軸的當前位置,是一種旋轉(zhuǎn)式行程測量系統(tǒng)。 分解器如下圖: 庫卡 機器人 KRC4分解...