這些位置數(shù)據(jù)在 RDC 內(nèi)乘上一個(gè)內(nèi)部演算系數(shù),并換算成電機(jī)角度度數(shù)。
在 EDS 里,可保存每條軸的絕對(duì)位置值 (64 Bit)。
從該時(shí)間點(diǎn)開始,只能繼續(xù)利用電機(jī)角度值來計(jì)算。
在 C:\KRC\Roboter\RDC 之下的文件 [Ser.Nr.].cal 里,存有校準(zhǔn)位置 (單位:度數(shù))。
不過該文件只在以下條件下才能保存到硬盤:
1 在 HMI 的菜單 【投入運(yùn)行】 -> 【機(jī)器人數(shù)據(jù)】之下按住了 【保存 RDC數(shù)據(jù)】鍵
2 已經(jīng)成功建立一個(gè)檔案
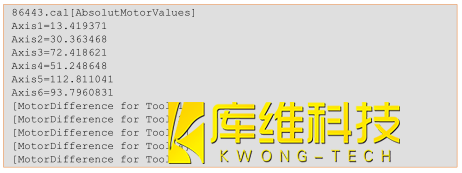
在校準(zhǔn)位置并非所有軸都已設(shè)為 0° 或 90°,而是準(zhǔn)確數(shù)據(jù)已保存在機(jī)器數(shù)據(jù)里 ($mames)
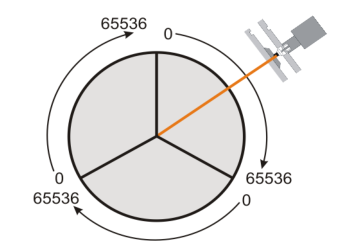
電機(jī)不能繼續(xù)旋轉(zhuǎn)
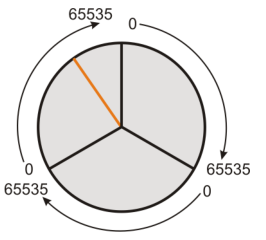
繼續(xù)旋轉(zhuǎn)時(shí)的分解器位置如下圖:
機(jī)器人位置在極短時(shí)間間隔內(nèi)、工業(yè)機(jī)器人停止運(yùn)行時(shí)或工業(yè)機(jī)器人控制系統(tǒng)關(guān)機(jī)時(shí)被持續(xù)保存。
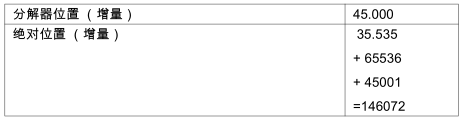
注意:在控制系統(tǒng)起動(dòng)時(shí),最新提供的庫卡機(jī)器人分解器當(dāng)前位置值將與已存的庫卡機(jī)器人分解器位置值相比較,其中增量值為 1000:
1如果兩個(gè)數(shù)值相等,則將絕對(duì)位置應(yīng)用到增量里,機(jī)器人也就準(zhǔn)備就緒可
以運(yùn)行。
2 如果兩個(gè)數(shù)值存在偏差,則必須重新校準(zhǔn)
工業(yè)機(jī)器人。HMI 里將顯示與此相關(guān)的一條訊息